3.20 CAN测试
CAN(Controller Area Network,控制器局域网)是一种用于实时控制系统和网络通信的串行通信协议,最早由德国博世公司(Bosch)于 1980 年代开发。它在汽车电子领域得到了广泛应用,用于连接和通信车辆中的各种电子控制单元(ECU),如引擎控制单元、传感器、执行器等。
测试CAN需要用户手上有USB CAN(FD)分析仪,如周立功的CAN(FD)分析仪等,如果用户是搞CAN这块的,那么这部分用户应该有CAN(FD)分析仪。
如果你是初学者,需要购买CAN(FD)分析仪,测试CAN就需要购买CAN(FD)分析仪。或者两块开发板CAN接口对接也可以测试,有条件或者需求就购买CAN(FD)分析仪。但是USB CAN(FD)分析仪往往价格不菲,比一套板子还要贵。
周立功的USBCANFD 200U可以测试CAN或者CANFD。注意CAN是半双工的,不能同时收发。
本次实验就使用了周立功的USB CANFD分析仪,如下图。注意,关于CANFD分析仪的使用请咨询商家,本实验不讲解USB CANFD分析仪的使用。
开发板CAN接口位置如下。
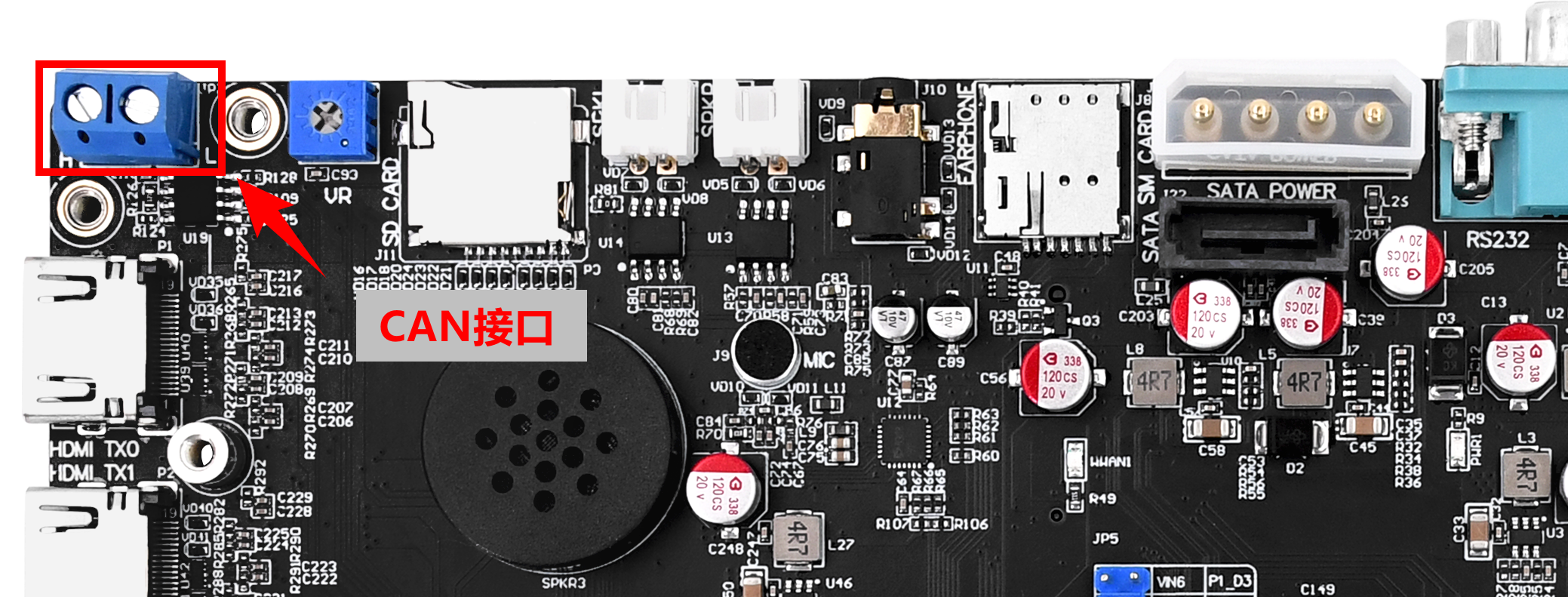
将USB CANFD分析仪一个通道的CANH接开发板的CAN接口处的H,CANL接开发板的CAN接口处的L,启动CAN上位机。
输入下面的指令配置CAN。
ip link set can0 up type can bitrate 1000000
指令解释:
1. ip link set can0 up:将CAN0接口设置为启用状态。
2. type can:将CAN总线类型设置为CAN。
3. bitrate 1000000:将CAN总线的比特率设置为1Mbps(1000000 bits/sec)。
注CAN总线通常支持从1 kbps(千位每秒)到1 Mbps(兆位每秒)的位速率范围,一般取值为800k、500k、250k、125k、100k和50k。

执行下面的指令打印CAN的信息。
ip -details link show can0

CAN发送:
发送(标准帧,数据帧,ID:123,data:DEADBEEF):
cansend can0 123#DEADBEEF
发送(标准帧,远程帧,ID:123):
cansend can0 123#R
发送(扩展帧,数据帧,ID:00000123,data:12345678):
cansend can0 00000123#12345678
发送(扩展帧,远程帧,ID:00000123):
cansend can0 00000123#R

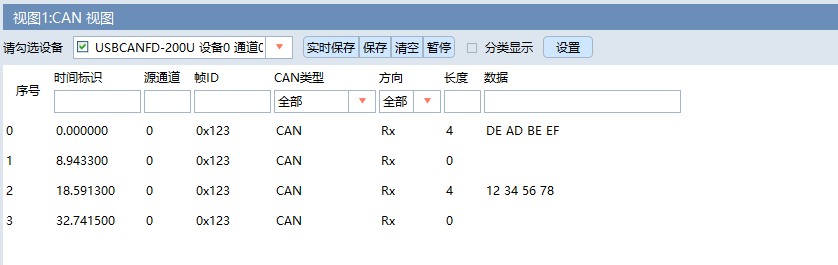
CAN上位机收到数据如下。
CAN接收数据输入下面的指令等待接收:
candump can0
CAN上位机发送数据如下图,这次我们发送8个字节。
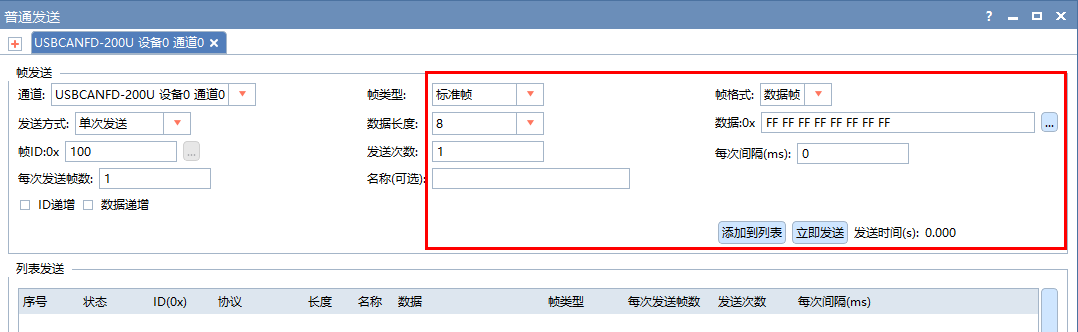
开发板接收到8个字节如下图。

CAN随机生成数据发送,发8个字节。脚本如下。
#!/bin/bash
# 循环发送10000次
for ((i = 1; i <= 10000; i++)); do
# 生成随机的8字节数据(16个十六进制数字)
random_data=$(od -A n -t x8 -N 8 /dev/urandom | tr -d ' ')
# 构建cansend命令
cansend_cmd="cansend can0 123#${random_data}"
# 执行cansend命令
eval $cansend_cmd
echo "Sent CAN frame $i with data: $random_data"
# 等待一段时间,以控制发送速率(单位:秒)
sleep 0.01
done
上位脚本发送10000帧间隔100ms数据测试,等待测试完成后,上位机也发送10000帧数据间隔10ms给开发板CAN。
错误帧测试结果如下。错误率为0%。
![]()